With application in single cell surgery, cell measurements, cell enucleation and tissue engineering, robotic manipulation of micron scale biological samples is a challenging operation which requires high dexterity and precision.
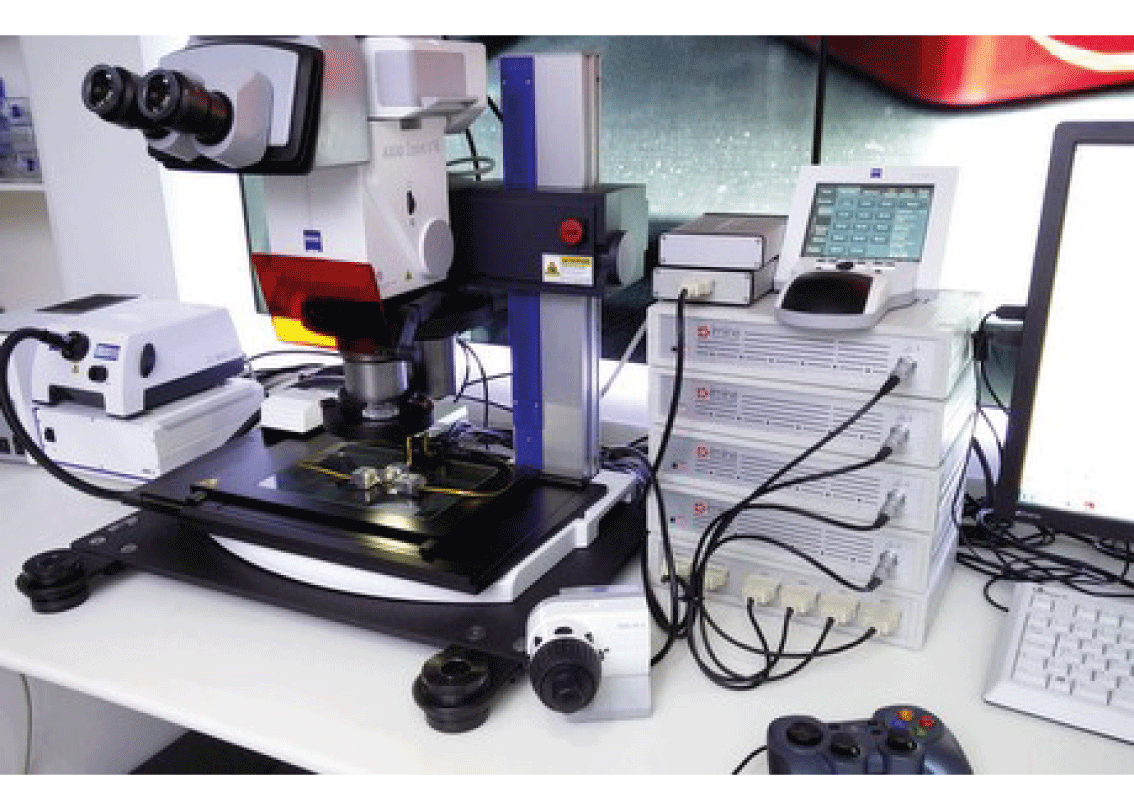
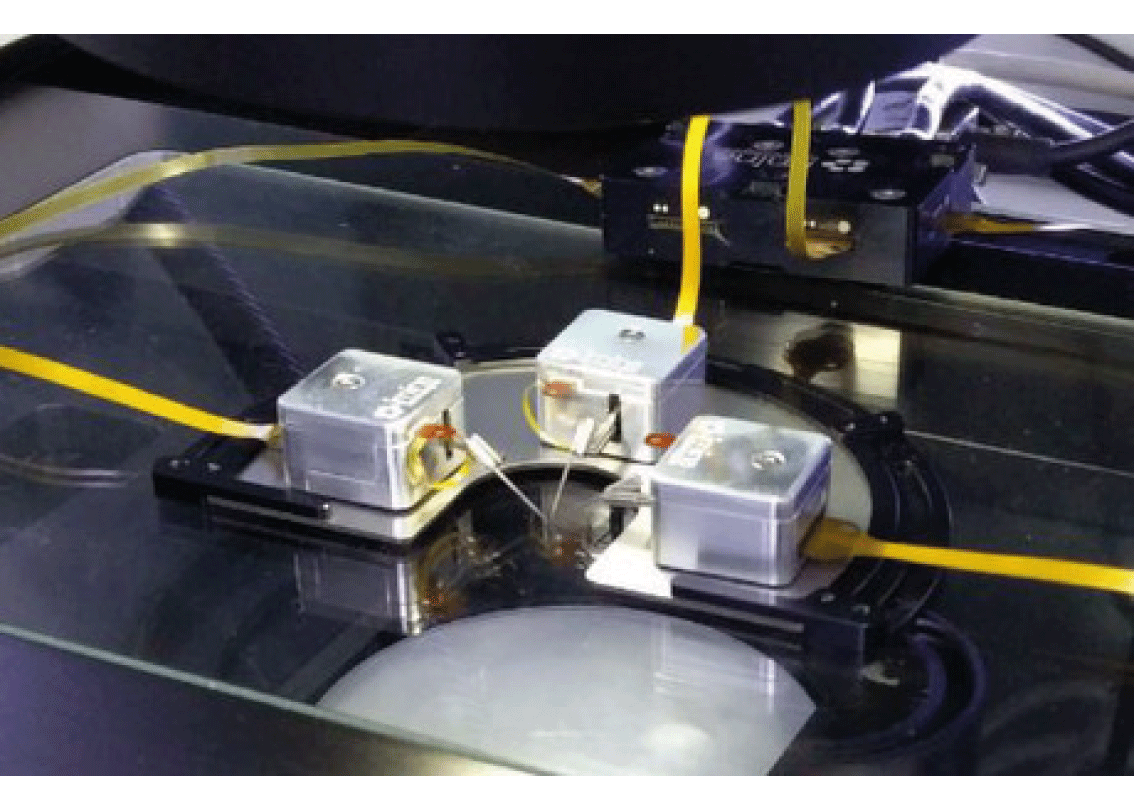
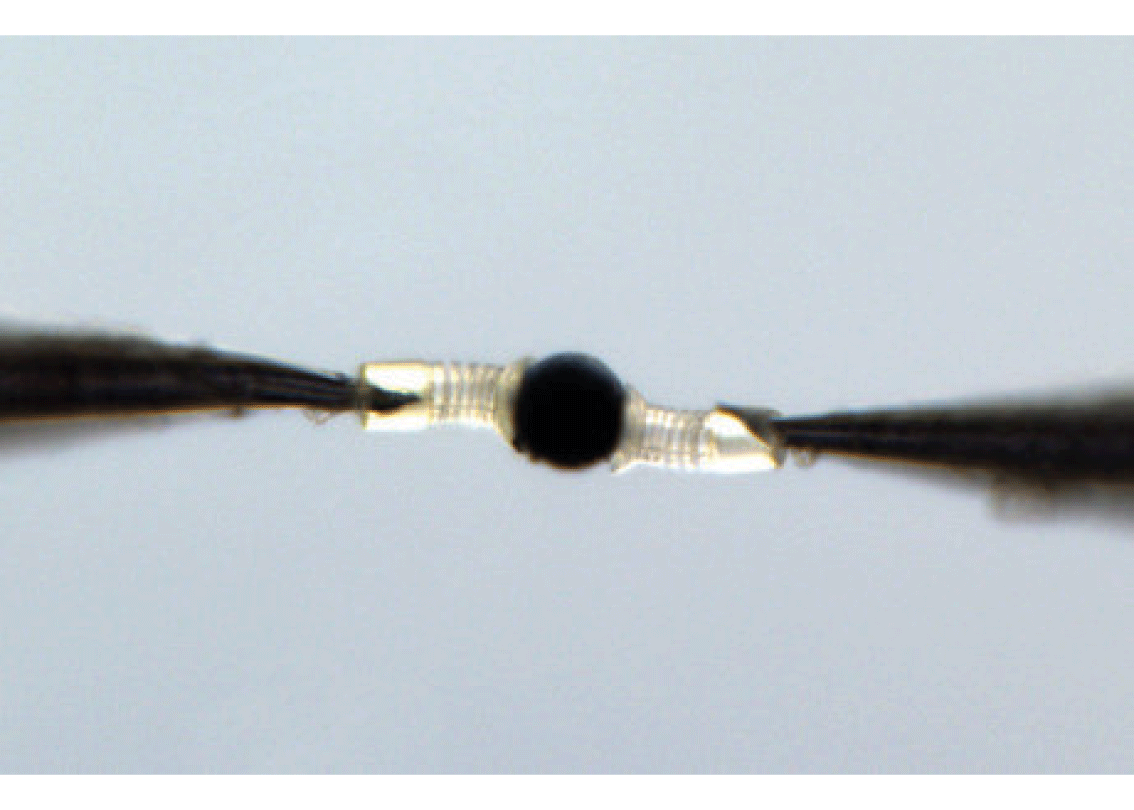
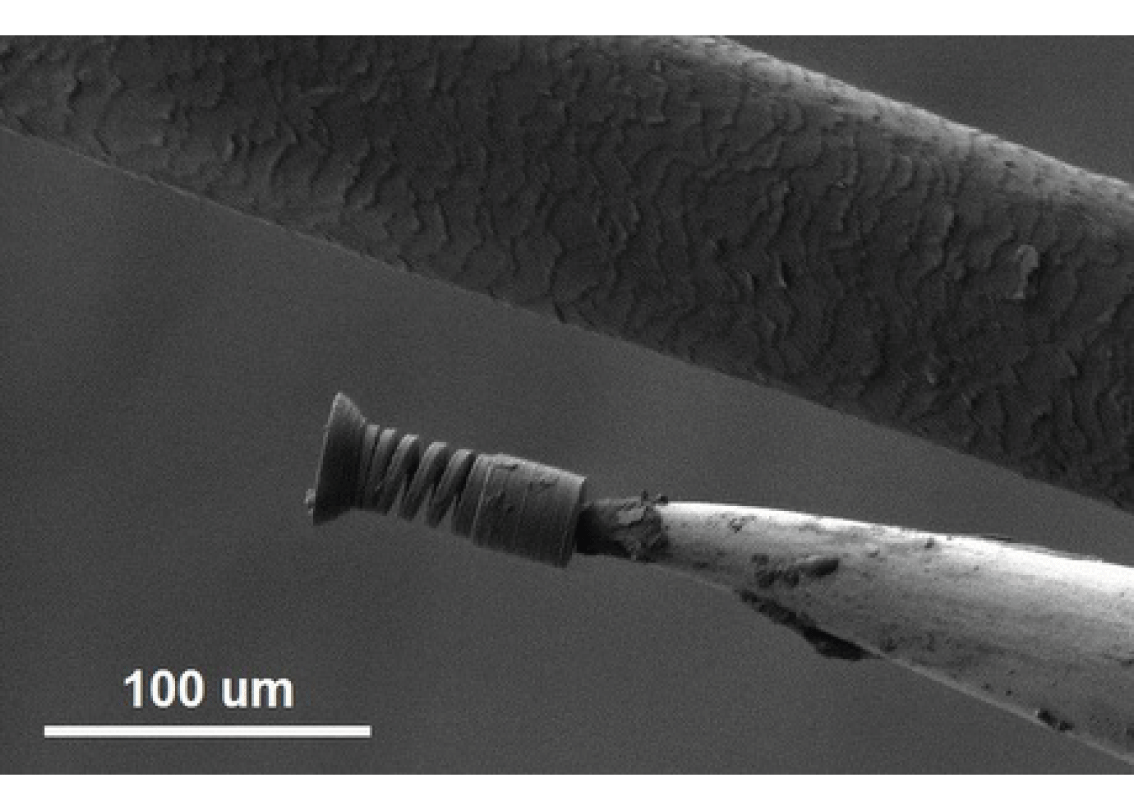
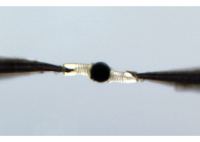
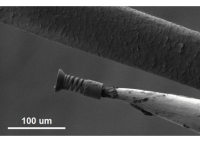
This application note reports on the work that is carried out at the Hamlyn Center for Robotic Surgery of Imperial College London and aims at tackling these challenges. A multi-robots system was developed. It takes advantage of the high motion smoothness of Imina Technologies’s mobile micro-robots as well as their flexibility to easily adjust the position and orientation of the end-effector to various sample shapes and dimensions. To ease the handling and transport of micro-particles, compliant end-effectors were printed on the manipulator probes. A computer software was programmed to assist the human operator with semi-automated robot cooperation tasks.
Hamlyn Center for Robotic Surgery of Imperial College London, United Kingdom
Maura Power and Guang-Zhong Yang, Direct Laser Written Passive Micromanipulator End-Effector for Compliant Object Manipulation, 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
We have fully equipped demo lab for semiconductor electrical failure analysis. Our applications team is eager to perform live demonstrations and feasibility studies for you, onsite or online.
In the meantime, do not miss the opportunity to learn more about our products and applications with one of our webinars!